

Resilient Autonomy
The Smart Systems Group at the University of Glasgow hosts a wide range of robotic platforms and projects. The group tackles both top-down and ground-up challenges relating to robotics within resilience, reliability and self-certification of robots to extend and optimise autonomous missions.
Symbiotic Multi-Robot Fleets
We propose a Symbiotic Multi-Robot Fleet (SMuRF) deployed in partnership with a human-in-the-loop. Symbiosis provides a new collaborative learning strategy to increase robot team performance and resilience to stochastic environmental variables. Alongside improvements in cyber physical coordination, management, and deployment of multi-robot fleets. The management of SMuRF is implemented via a digital architecture that permits near to real-time communication for up to 1600 distributed robots, sensors, and assets.
Symbiotic System of Systems Approach for Robotics
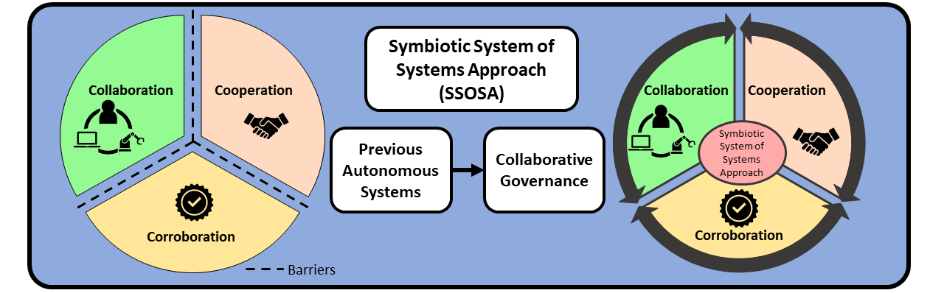
To reduce Operation and Maintenance (O&M) costs on offshore wind farms, wherein 80% of the O&M cost relates to deploying personnel, the offshore wind sector looks to Robotics and Artificial Intelligence (RAI) for solutions. Barriers to Beyond Visual Line of Sight (BVLOS) robotics include operational safety compliance and resilience, inhibiting the commercialization of autonomous services offshore. To address safety and resilience challenges we propose a Symbiotic System Of Systems Approach (SSOSA); reflecting the lifecycle learning and co-evolution with knowledge sharing for mutual gain of robotic platforms and remote human operators. Our novel methodology enables the run-time verification of safety, reliability and resilience during autonomous missions. To achieve this, a Symbiotic Digital Architecture (SDA) was developed to synchronize digital models of the robot, environment and infrastructure and integrate front-end analytics and bidirectional communication for autonomous adaptive mission planning and situation reporting to a remote operator. A reliability ontology for the deployed robot, based on our holistic hierarchical-relational model, supports computationally efficient platform data analysis. We demonstrate an asset inspection mission within a confined space through collaborative governance (internal and external symbiosis) via decision-making processes and the associated structures. We create a hyper enabled human interaction capability to analyze the mission status, diagnostics of critical sub-systems within the robot to provide automatic updates to our AI-driven run-time reliability ontology. This enables faults to be translated into failure modes for decision making during the mission. We also increase situational awareness with foresight sensing, based on robust, opaque environment compliant sensing to monitor unforeseen ambient risks. Our results demonstrate that the symbiotic system of systems methodology provides enhanced run-time operational resilience and safety compliance to BVLOS autonomous missions. The SSOSA, is highly transferable to other mission scenarios and technologies, providing a pathway to implementing scalable and diverse autonomous services.
Holistic Operation and Maintenance for Energy (HOME) from Offshore Wind Farms
Investigating how to de-risk offshore wind operations, reduce costs and make better use of assets through the applications of Modelling and Data Science, Machine Learning, Advanced Sensing and Robotics.